本文共 1978 字,大约阅读时间需要 6 分钟。

本系列文章主要针对工业/协作机械臂,从应用、整体架构、核心算法、核心零部件、到核心零部件的技术实现有一个整体的介绍,是自己所学知识的一个归纳,也希望帮助感兴趣的同学,能快速对机械臂有一个整体的认识。
本文是本系列第一篇,主要介绍机器人技术的学习和开发资源,以及核心零部件,将按照以下顺序陈述:
- 机器人学
- 核心零部件
- 举个例子
机器人学
以下书的资源在CSDN的下载区均可以找到。
机器人学的基本理论学习和详细的推导,建议参考John J.Craig的机器人学导论。
Orocos 的KDL机器人运动学动力学库非常强大,C++写成,全开源,可以用于实际项目。但是其逆解采用的是数值解,速度较慢,建议将逆解部分替换成自己的函数,比如通过OpenRave中的IKfast生成逆解函数,或者自己写逆解函数(推荐)。
KDL wiki | The Orocos Projectwww.orocos.org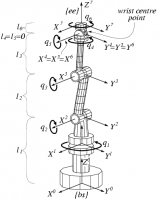
MATLAB的Robotics system toolbox 功能丰富,使用简单,大部分m语言的代码可通过MATLAB Coder自动生成C/C++的文件,适合学习和研究。
Robotics System Toolboxwww.mathworks.com
轨迹生成的理论学习,建议参考Trajectory Planning for Automatic Machines and Robots。
在线轨迹生成(OTG)的理论学习,建议参考On-Line Trajectory Generation in Robotic Systems,此书的作者就是下面提到的Reflexxes Motion Library的作者。
Reflexxes Motion Library,C++写成,实现了在线轨迹生成,支持多轴时间同步和多轴相位同步,但开源的版本仅支持二阶连续(即加速度不连续),四阶连续(Jerk连续)的版本需要联系官方授权。
Reflexxes - Online Trajectory Generation - Roboticswww.reflexxes.ws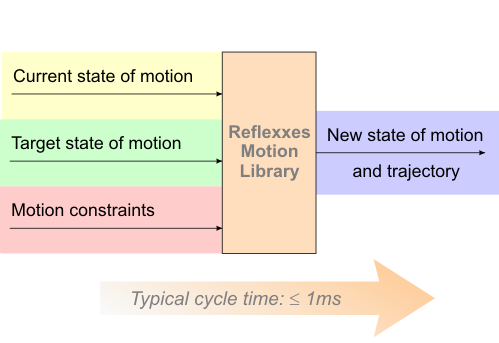
运动规划的理论学习,资料非常丰富,并且处于发展完善之中,这里就不列举了
OMPL 的运动规划功能强大,全开源。
The Open Motion Planning Libraryompl.kavrakilab.org
力控制因为涉及的内容比较综合,我另外再写一篇文章。
核心零部件

机器人的核心零部件包括:减速器,电机,编码器,驱动器,控制器。
减速器主要用的有三类:谐波减速器,RV减速器,行星减速器。
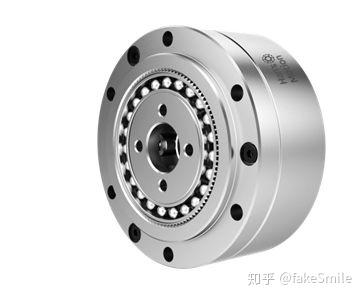
其中,RV的刚度高,精度高,一般用于工业机器人的底部关节,谐波减速器的精度高,刚度较低,广泛用于协作机械臂;行星减速器的价格便宜,但精度低,用于廉价机械臂。
国产的绿的谐波比较出名。深圳的同川精密也做谐波减速器。
有一点需要注意的,即减速器本身的间隙,是无法通过控制算法去弥补的,所以减速器的间隙,决定了机械臂精度的上限。
电机主要用的有两类:永磁同步电机,交流异步电机。
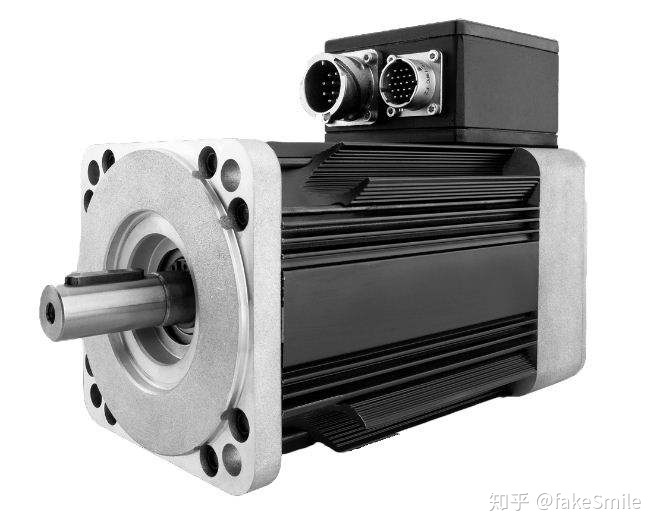
随着对力控和精度的更高要求,步进电机在多轴机械臂上逐渐淘汰,目前主流的协作机械臂,均采用永磁同步电机,比如UR机器人,采用的是科尔摩根的无框电机。
永磁同步电机使用FOC(磁场定向控制)技术来控制电机
编码器主要用的有两类:光编码器,磁编码器

编码器的作用有二,一是为FOC控制提供相位信息,二是提供位置信息。编码器芯片厂家有IC-Haus、AMS等。编码器厂家有尼康、RLS等
iC-Haus China - 主页www.ichauschina.com
驱动器:汇川,固高,倍福
控制器:KEBA
总线:总线严格来说不属于一个单独的部件,驱动器和控制器都是支持某种总线的。由于总线种类比较多,所以单独拿出来说一下。
目前协作机器人常用RS-485,CAN,EtherCAT;
其中RS-485上限通信频率为10M,CAN的上限通信频率为1M,EtherCAT上限通信频率为100M,常用modebus或者CANopen CIA-402作为通信协议。
我会另写两篇文章,介绍如何设计一个驱动器,和控制器
举个例子
主流方案:控制器-(EtherCAT)-伺服驱动器+伺服电机(含编码器),各个部分都可以单独购买,很容易能做出一条机械臂系统。
非主流方案:FPGA驱控一体+伺服电机(含编码器),优点是结构紧凑,成本低,但是研发成本高,且普适性不强。
UR:将驱动器、编码器、电机、减速器做在了一起,作为一个关节,关节与控制器通过RS485总线通信,其123关节是一样的,456关节是一样的,这样极大的节省了成本。
转载地址:http://jljdv.baihongyu.com/